■概要
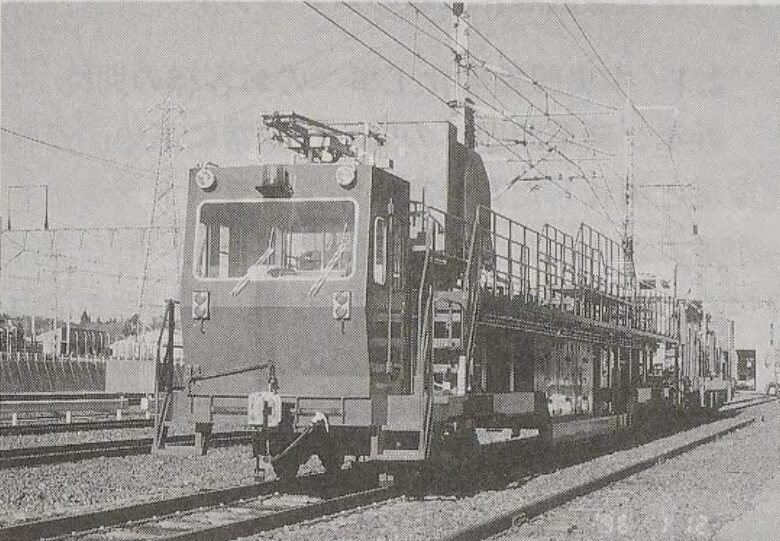
1994年に完成し、JR東日本に導入された架線延線におけるハンガの掛替を目的とした電気作業車である。
取り纏めのメーカーは不明であるがハンガの掛替装置は三和テッキ、専用台車の台枠は協三工業が製作している。また本車の機構の特許申請の出願者には川崎重工と日本電設が確認されている。
■導入背景
JR東日本では富士重工製SWを中心とした6両編成の保守用車群でプレストレッチ工法で架線延線を施工していた。
この工法は架線に過張力を20,30分印加(プレストレッチ)後に400個程度あるハンガを30~40人程度の人員を要して一斉に架け替えるというものであった。
JR東日本では将来的な電車線工の減少に伴う架線張替が困難になる恐れから、省力化工法の開発と作業環境の改善を目差し、機械化・自動化・ロボット化を取り入れた装置の開発を行うこととした。
本車はこのような背景より開発された車両で、ハンガ自動取付替ロボットとそれが移動するハンガロボット位置制御台車で構成される。
■来歴
ハンガ取付替装置は開発にあたっては複数の試作機が製造された。
試作1号機は1991年10月に設計着手、1992年3月に完成した。
1992年10月には試作2号機の設計に着手、1993年8月に完成。1994年1月に試作2号機の改修に着手、同年2月に各種条件下で取付・取外1万回の耐久試験を実施している。
6月には専用台車に搭載され、基地線にて連続取付・取外確認を実施。8月には本線上での性能確認試験を実施した。
1995年5月にはコストを考慮しセンサを削減、多量伝送制御を採用した試作3号機の設計に着手。1996年1月には試験完了。なおこの試験では試作2号機との協調試験を実施している。
1997年6月にはハンガ取付専用の実機4台の設計を開始。1998年6月には基地に搬入して4代での協調を確認している。
1998年8月には取外実機4台の設計を開始。1999年6月には取外機を取付も兼用できるように改造。2000年1月には各種機能を改良している。
2000年度には本格的に実作業に投入される予定であり、その結果を踏まえ1編成の増備が計画されていたが、その後量産されることはなかった。
■構造
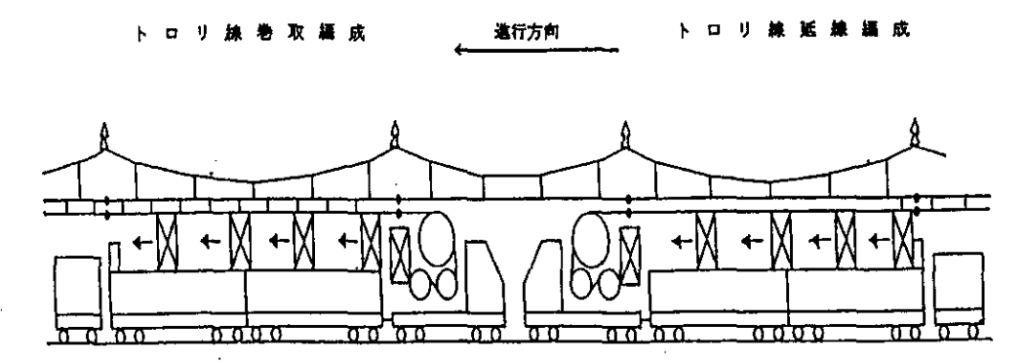
延線車に牽引されるロボット位置制御台車と台車上でハンガを自動で取り替える装置で構成される。巻取編成群で取付・取外兼用ロボットの4台を台車2台に、延線編成群にも取付専用ロボット4台を台車2台に搭載してして運用される。
・ロボット位置制御台車
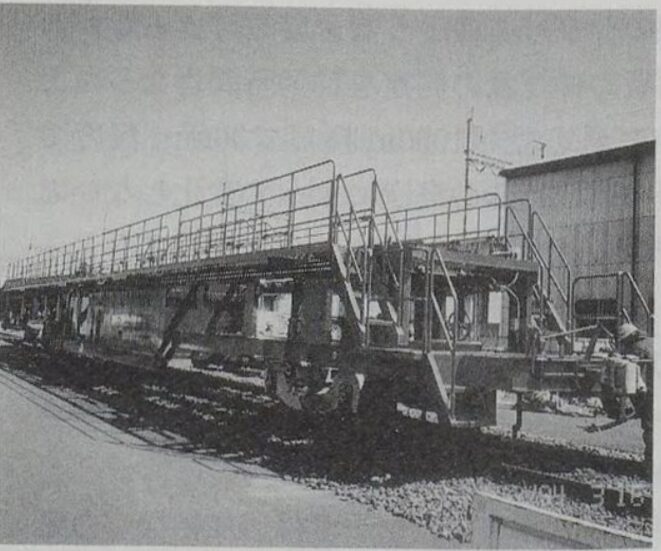
ロボットが移動する台車。1編成当たり2両で構成され、端部には制御室と思しき部屋が搭載されている。
・ハンガ自動取付替ロボット
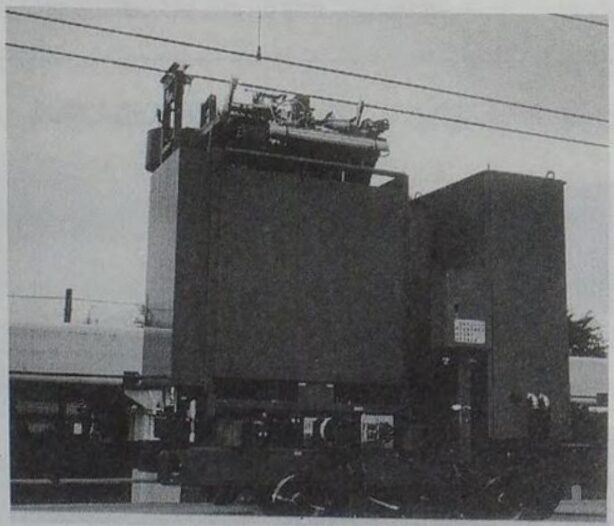
ハンガ自動取付替ロボットはロボット位置制御台車の上を自動で移動してハンガの取付・取替を行うことができる。1本のハンガ当たり取付・取外をそれぞれ20秒で行うことができる。
なお本ロボット導入にあたってJR東日本では、ちょう架線保護カバーを一体とした新型のハンガを開発している。
参考文献
1.井口茂男,『新幹線トロリ線張替に伴うハンガ自動取付替装置の開発と実用化』、第10回鉄道電気技術研究発表会論文集、(2000/10)
2.加藤修『新幹線トロリ線自動張替装置の開発』,JREA,第38巻 10号,日本鉄道技術協会,(1995/10)
3.東日本旅客鉄道株式会社 特開平07-246864「電車線作業装置」
4.協三工業株式会社 製品例 http://www.kyosankogyo.co.jp/albumr.html(2024.02.18)